
RCと実車のセッティングの違いが見えてきたので
少しずつまとめます
実車とRCの一番の違いは
「寸法が1/10なのに重量は1/1000」って事
パワーウェイトレシオが良いから加減速性能抜群♪
なんて喜べない由々しき事態があります。
実車は
「1g程度の旋回横gで滑り出すタイヤを如何に喰わせて前に進めるか?」
って方向で考えるんですが
RCはスケールに対して重量が著しく軽い
1/10ツーリングカーはだいたい1400gだから実車換算すると
車両走行重量が14000g=14kgですよ、、、
数字で見ると
如何に異常な条件で走っているのがイメージできます。
極軽量な事により
シャシー&タイヤが発生する向心力が強く
ステアリング入力だけでロールオーバーモード(横転)に至るので
サスペンションセッティングの考え方が実車とは根本的に異なります
面倒ですが
難関で簡単には走らない車を
理解して作り込んで走るようにするから面白いんです♪
最初に
RCで一番苦しむ案件
ロールオーバー(横転)が発生する原因を理解するのが大切
スタート地点は
「最大安定傾斜角」
の理解
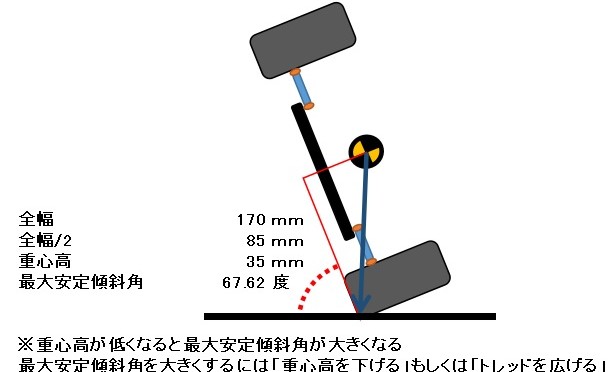
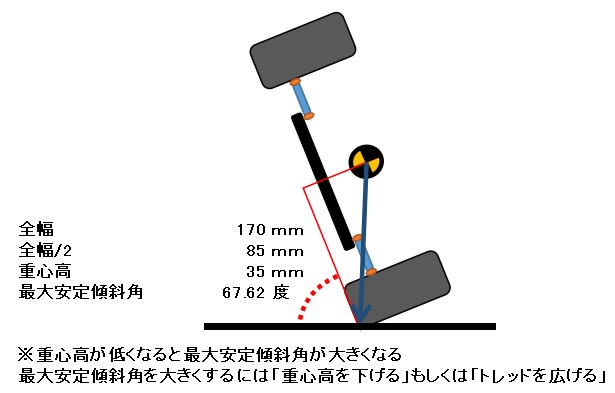
この角度は
ある車をロール方向に倒れる台に乗せて
どんどん傾けていき
横転する寸前の角度を定義した角度
この時のベクトルを見ると
重心から垂直に下げたベクトルがタイヤショルダーと一致してバランスした状態になってます
つまりこれ以上傾けたら
ベクトルがタイヤショルダーを超えて
「コロンとコケちゃう」って事
最大安定傾斜角を
三角関数を用いて求めると
短辺 35mm(重心高)
長辺 85mm(車両巾170mm/2)
斜辺 92mm(重心高〜アウト側タイヤショルダー)
角度 22.4°
最大安定傾斜角は車両のロール角なので
67.6°(=90°−22.4°)
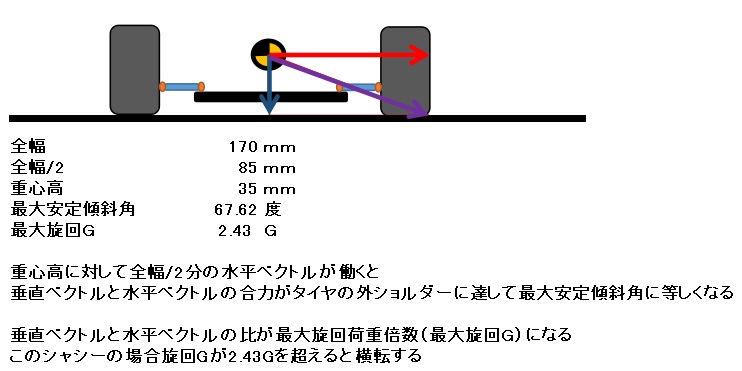
この最大安定傾斜角から
車を傾けずにロールオーバーモードに入る条件を考えると
重心高 35mm
車両巾 170mmの車が旋回すると
重心から垂直下方向に働くベクトルに遠心力が作用して
「見かけの重力」がOut方向に傾いていきます
旋回半径が小さくなったり
旋回速度が高くなると
遠心力(≒旋回横g)が強くなり閾値に達すると
「見かけの重力」のベクトルがアウト側タイヤショルダーを超えるので
タイヤショルダー部分を支点として重心を持ち上げる運動(ロールオーバーモード)に入り横転します
このときの遠心力は短辺と長辺の比になるので
2.43g(=85mm/35mm)
閾値の2.43gを超えた瞬間にロールオーバーモードに入り横転に至る
って事です
(サスペンションストロークをガン無視してるのでイメージ作り程度です)
実車(R33 GT-R)で確かめ算してみると
全幅 1750mm
全幅/2 875mm
重心高 550mm
最大安定傾斜角 57.9°
(実測値はロールするから 55°)
最大旋回G 1.59G
R35 GT-RやNSX
最近の馬、牛、カエルの実測旋回Gが1G付近なのでイメージ合いますね♪
さらに、、、
RCは車両重量に対してタイヤ幅が広く
接地荷重が不足してるので
「接地面積が少ないほどグリップ力が上がる」って厄介な特性があります
旋回gが高まる程
アウト側タイヤのショルダーに寄りかかるようなタイヤの使い方になり
接地面積が減り面圧が高まるので
ロールが深くなるほど
グリップ力が上がっちゃうから
スリップダウンして自然にリカバリーは不可能です。
つまり
ロールオーバーモードを入れないためには
「最大安定傾斜角相当の旋回遠心力を超えさせないサスペンションセッティングを作り出す」
がポイントになります。
ブログランキングに参加しています、記事を気に入っていただけましたら
↓クリックしていただけると嬉しく思います。
![]()
にほんブログ村