
晩ごはんの後に
変なスイッチが入っちゃって、、、
レイアウト変更までして合わせ込んだ「前後重量配分40:60」をあっさり捨てて
代わりに「男のロマン」を装備!
パッシブ制御のトゥコントロールリンクから
アクティブ制御の4WS(同位相4輪操舵)にしちゃいました
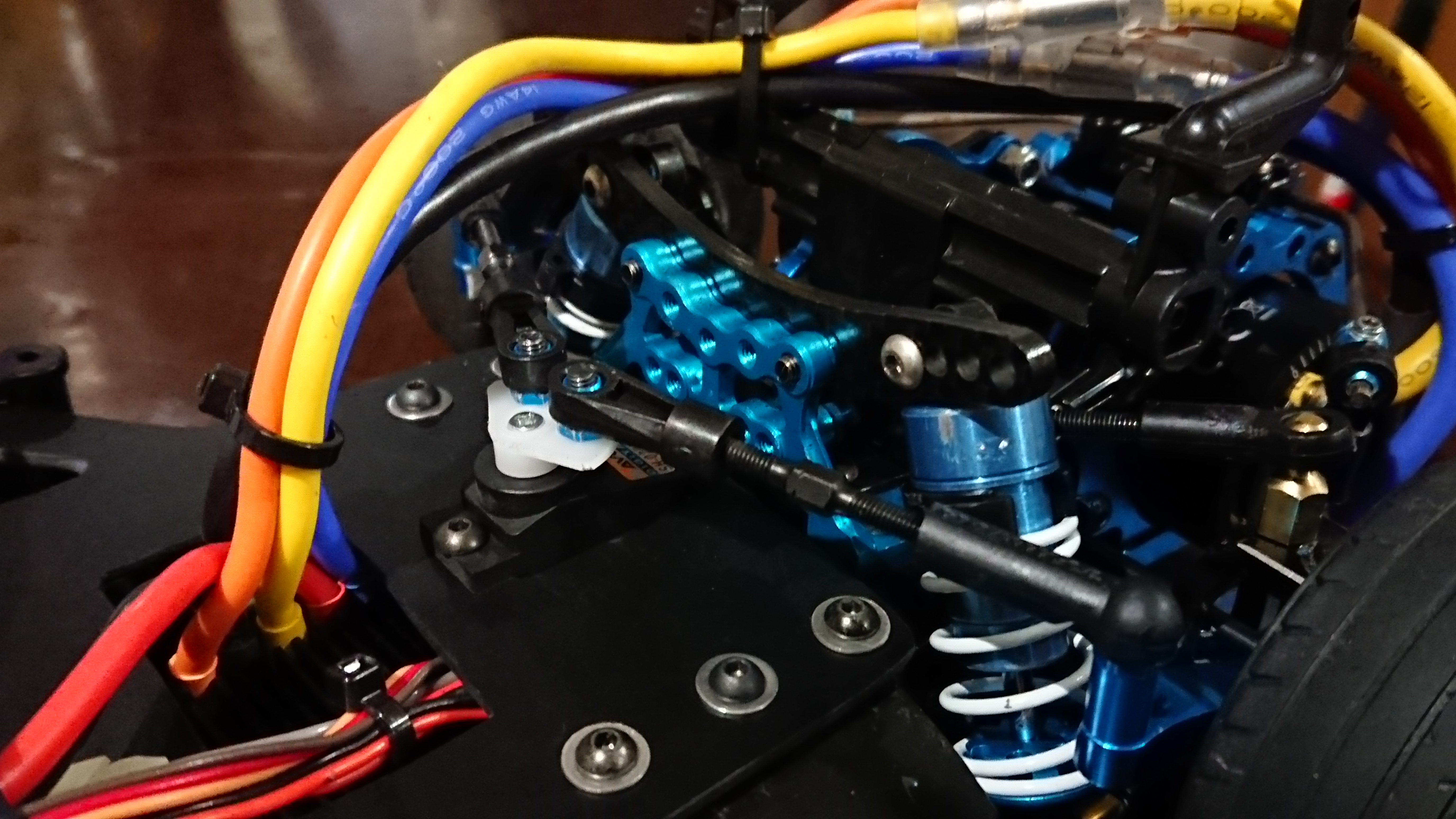
(バンプトゥ変化はリバンプトゥInでスタビリティに全振り)
・なんとか戦隊のロボットが合体する
・昨今の仮面ライダーの無駄に長い変身手順
・ガンダムが変形する
・自転車にウインカーが付いている
・◯X△km/hを越えるとスポイラーが出てくる
・アクセル抜くと「ぷしゅ~っ!」って鳴く
・具合が悪くなると4WDに化ける
・カーブを曲がる時に外側のタイヤが強く蹴る
理由なんて作ってから考える
それがギミックなのでつ!
「速くなるのか?」って!?
理論的には操舵中は仮想リアアクスル軸が後退するのでホイールベースが長くなり高速旋回安定性が向上
きっと速く走れるはず!(笑)
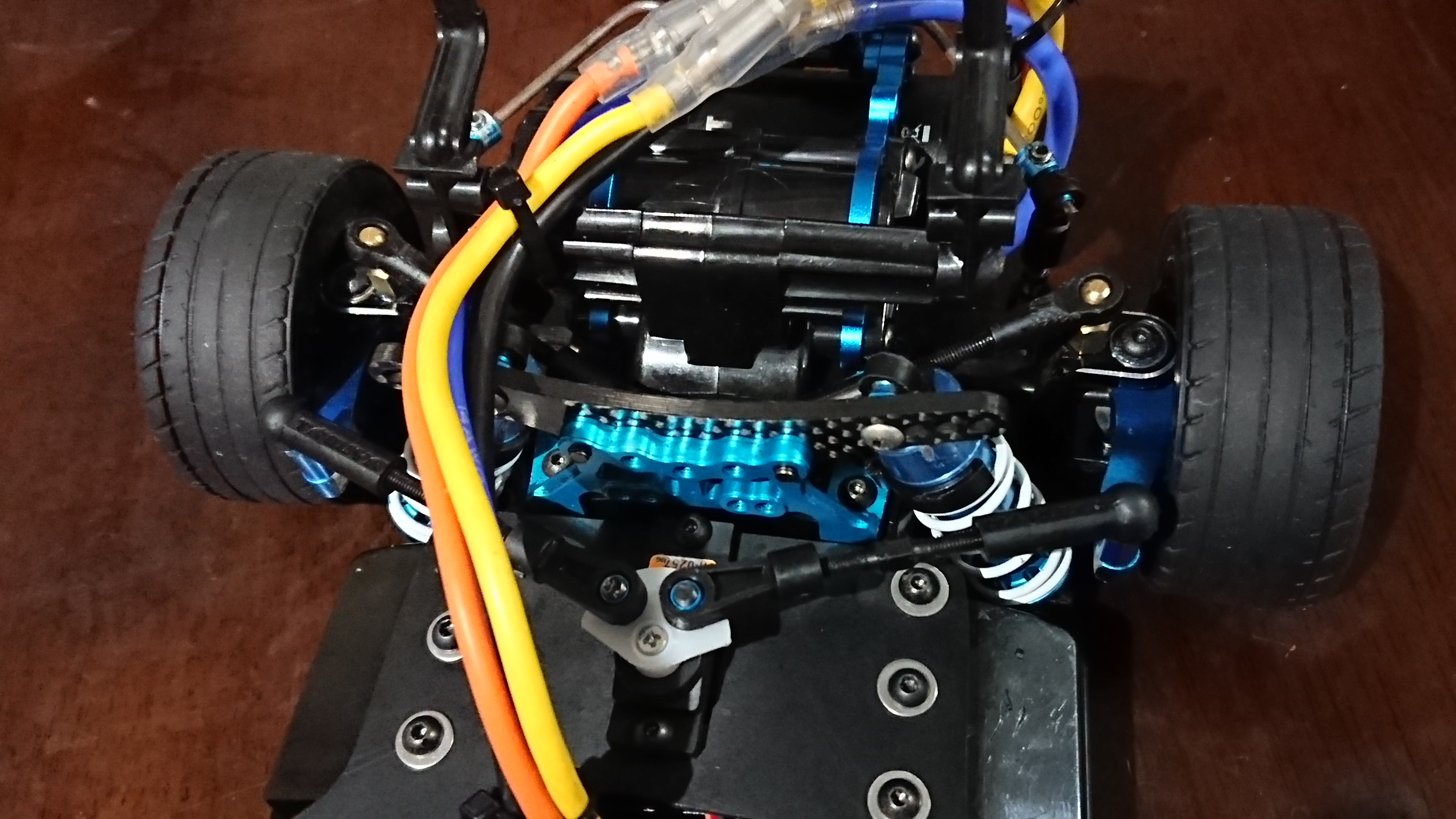
今は制御無しの同位相4WDだけど
最後の仕上げはヨーレートセンサー(ジャイロ)を追加して後輪操舵にミキシング掛けてヨーダンピング機能を追加
「電子制御4WS」だなっ!
ステアリング入力を逆位相にして
ヨーレートセンサーから同位相入力させれば
ハイキャスが作れるんじゃないか?
利点は
・サーキットに集うナウなヤングにバカウケ!
欠点は
・ガラスのリアサスペンション
・4WD級の車輌重量(1400g付近)
・電池喰う
・セッティング大混乱
・壊したら号泣
・リア ステアリングサーボホーンが消耗品
・アライメントがめんどくさい、、、
ブログランキングに参加しています、記事を気に入っていただけましたら
↓クリックしていただけると嬉しく思います。
![]()
にほんブログ村

全般ランキング