

先日の砂子塾 R-5
パイロンコースを覚えたところで午前中に練習した基礎旋回をパイロンコースに折り込んでいきます。
カウンターステアが次第に見えてきて
視点を遠くに送る事を意識させると
正確性が高まります。
砂子塾長にもOK判断を頂き、
今回のトレーニングメニューは及第点を頂きましたぁ♪
動画編集中に「舵角(≒向き変え)不足」の原因に気が付きました。
原因はシンプルで「旋回姿勢のイメージ違い」
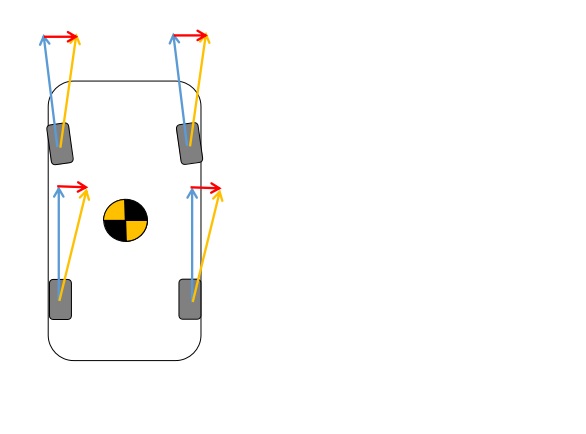
旋回後半のクリップから先はパワーONにより、旋回加速(≒慣性)によりリアへ荷重移動
パワーONでリアにトラクションが掛かり
加速する事でリアタイヤの旋回力が出つつ
フロントは加速による荷重移動
によりアンダーになり
遠心力でラインがOutへ膨らむ
リアのスリップアングルに対してフロントのスリップアングル+カウンター舵角で
バランスを取れば
車体はヨー角を取りながら前に進む
安定した「ドリフト」状態に入ります
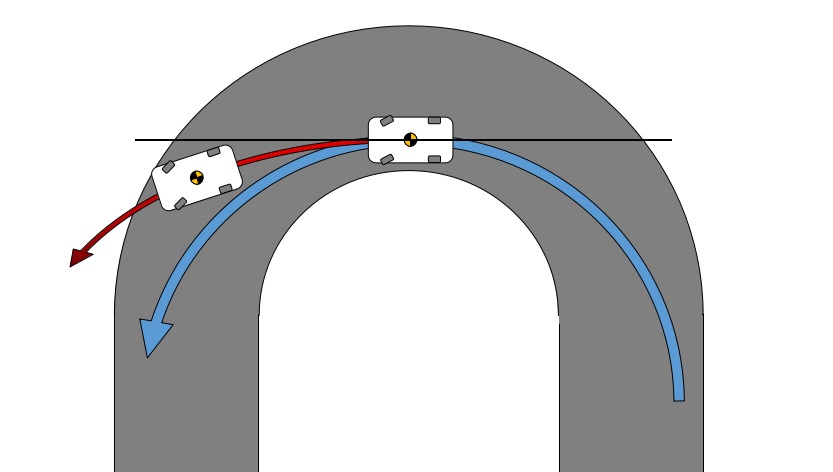
この時の走行ラインの航跡TR(トラック)は
ドリフト前のTRに対してドリフト角DA
(ドリフトアングル)分だけOutへ膨らみます
つまり、ドリフト中はアンダーステアなので
増速するほど2乗で増加する遠心力により
旋回半径が広がり
そのままだとコースから飛び出しちゃいます。
コレを追い舵でドライバーの我をねじ込むとアンダーオーバー(スナップ)でブッ飛ばされます。
だから、
クリップまでに深く向き変えしてパワーONの前に旋回半径を小さくしておきます。
小さくした旋回半径を
パワーON(増速)による遠心力増加で広げるので
「向き変え≒踏み代」ってイメージになります
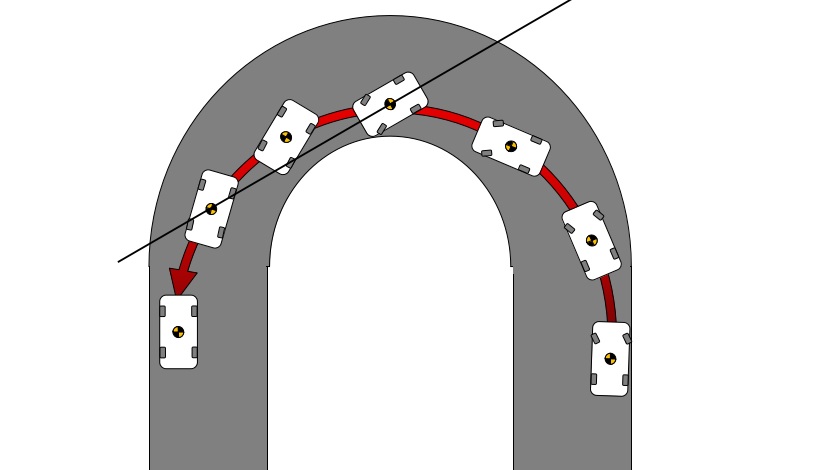
極端に描いてますが
クリップの車にある線は車の向きになるので
同じクリッピングポイントにある車のヨー角の違いが
向き変え完了or向き変え不足の判断差になります
この「パワーONの前に旋回半径を小さくする(≒よりより深く向きを変える)」イメージが無いので
車の姿勢は外を向いたままでパワーONの判断になっています。
僕がこのイメージの違いを練習中に気が付いて指摘出来ていれば
もう少し良い仕上がりに持っていけたのが残念に思います。
次回の砂子塾に活かして欲しいと思います!
ブログランキングに参加しています、記事を気に入っていただけましたら
↓クリックしていただけると嬉しく思います。
![]()
にほんブログ村

全般ランキング