
朝からM-06 Super HiCASの仕様変更と修理
年末のテスト走行で後輪操舵用サーボのサーボホーンが折れて走行不能
原因はタイロッド角度
バンプトゥを”±0.0″に近付けるためにアームロックしちゃうギリギリまで調整したら
操舵状態で当てちゃうとパキッと割れちゃうみたい
ココはタイロッドをヒューズ部品にしたいので
力ずく対策
壊れたサーボホーンを樹脂→アルミに変更して強度Up
コレでダメならサーボセイバーを弱めるしかないなぁ
モーターは調子が悪い15.5Tから17.5Tに換装
一度、最高速を下げてセッティングに専念します。
今回の主仕様変更はジャイロ換装
現仕様のジャイロだとヨー運動に対してカウンター(リア同位相操舵)を入れるんだけど
入れたカウンターをすぐに戻しちゃう
結果として
旋回中に微妙にリアがフラフラして落ち着かないし動きに再現性が無い
サスペンションセッティングをアンダーに振ってセンサーゲインを下げてバランス点を探っていましたが
どうにもイマイチ
で、、、
年末の走行会の時に賢者からいただいたアドバイスは
「ジャイロ制御モードが違う!」
との事
ジャイロは基本的に2WDドリフト用
「人間じゃ間に合わないカウンターを補完する」制御でヨー加速度が”0″になるとカウンターを戻す加速度制御
コレに対してグリップで使うジャイロはAVCS制御でRCヘリに使われる「ヘディングロック モード」
もちろんジャイロを使うのでヨー加速度からの補正舵信号を出すんだけど
加速度を積算して進路補正を織り込みます。
つまりヨー加速度を受けて進路が変わった場合
ノーマルモードは
「ヨー加速度を止めるだけ」であさっての方向へ進み
AVCSモードは
「ヨー加速度を止めて元の進路へ戻す」制御になるので自動進路補正して真っ直ぐ走る
進路補正機能だから”ヘディング ロック モード”って呼ばれるんですねぇ
ドリフトは
ノーマルモードで人間のコントロール能力を越えた領域をジャイロに「カウンター補正」してもらいながら
人間がカウンター操舵を入れる事で「操る面白さ」を作っていると考えます。
僕が作りたいのは「操縦安定性を高めるための後輪操舵」なので
考え方はRCヘリのジャイロに近くなり
AVCSモードが必要になります。
で、、、、
肝心のAVCSモードが搭載されているジャイロが フタバのGYDシリーズ

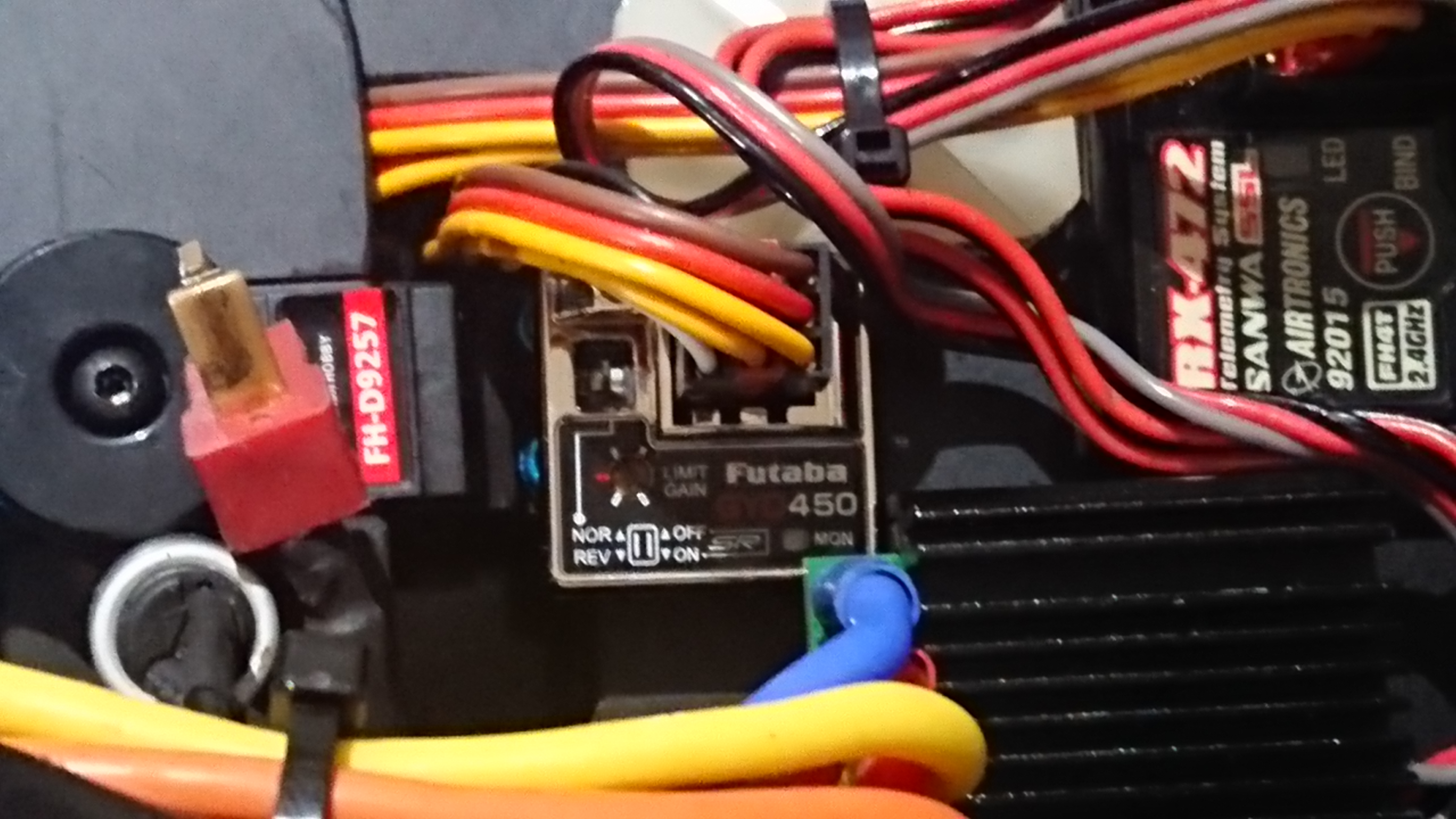
ゲイン調整でノーマルモードとAVCSモードが切り替え出来るので汎用性高いです♪
さて、、、、
狙い通りの動きになるかなぁ!?
ブログランキングに参加しています、記事を気に入っていただけましたら
↓クリックしていただけると嬉しく思います。
![]()
にほんブログ村

全般ランキング